TeddyBearWheelChair
This project asked our interdisciplinary student team to design, build, and code a wheelchair for a teddy bear as part of ENGG*1100. The wheelchair had to complete a range of performance tests, including a target-practice challenge using a ping-pong projectile.
Team members: Tooba Amir, Daniel Hyman, Eddie Goss, Julia Fellini, and Theshihan Suntharampillai.
Building Process
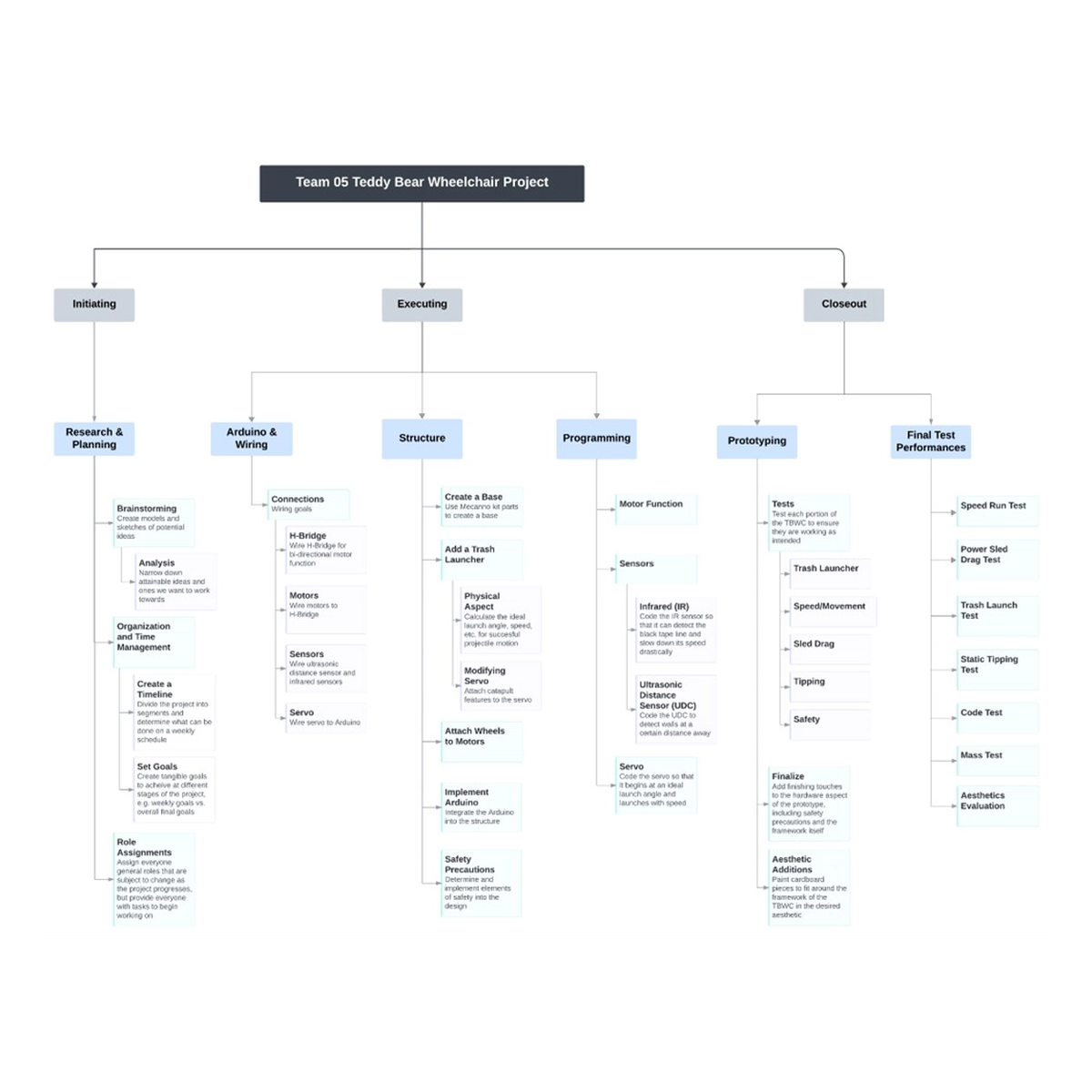
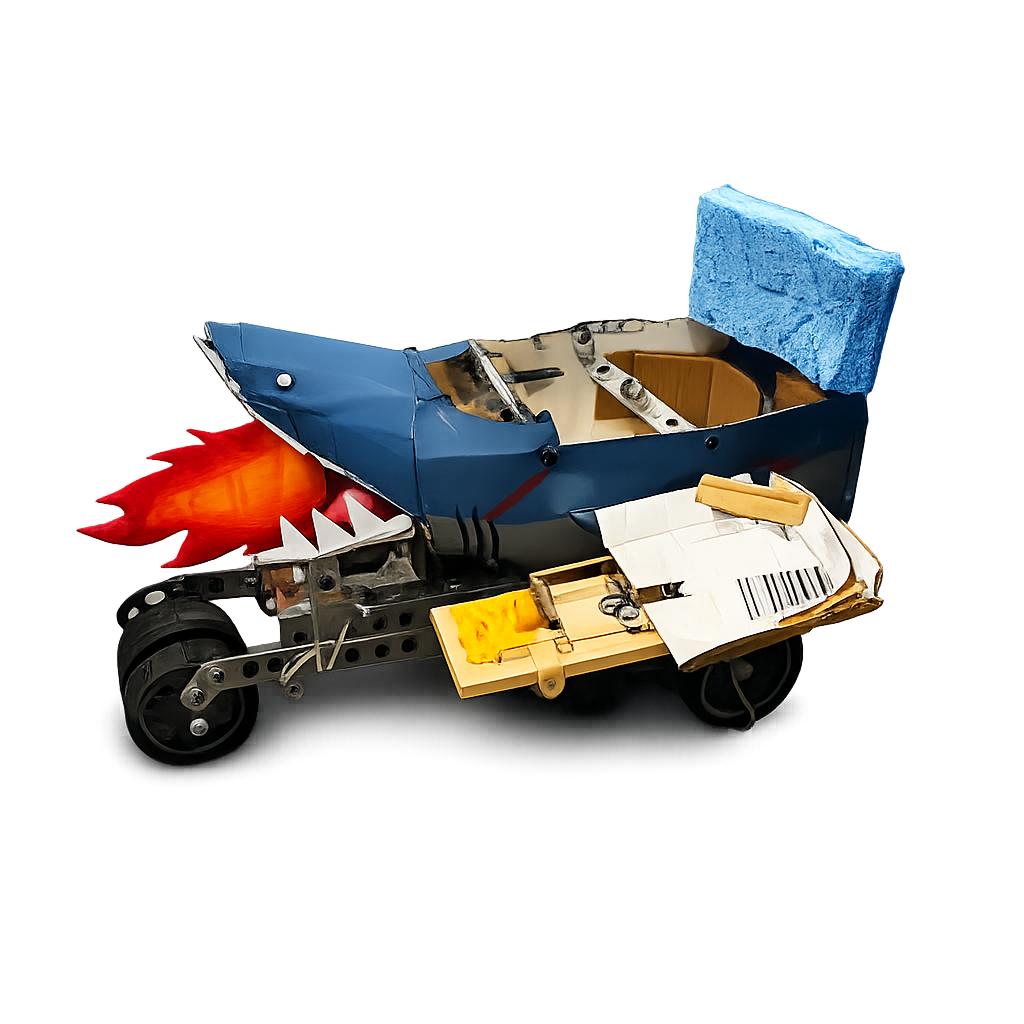
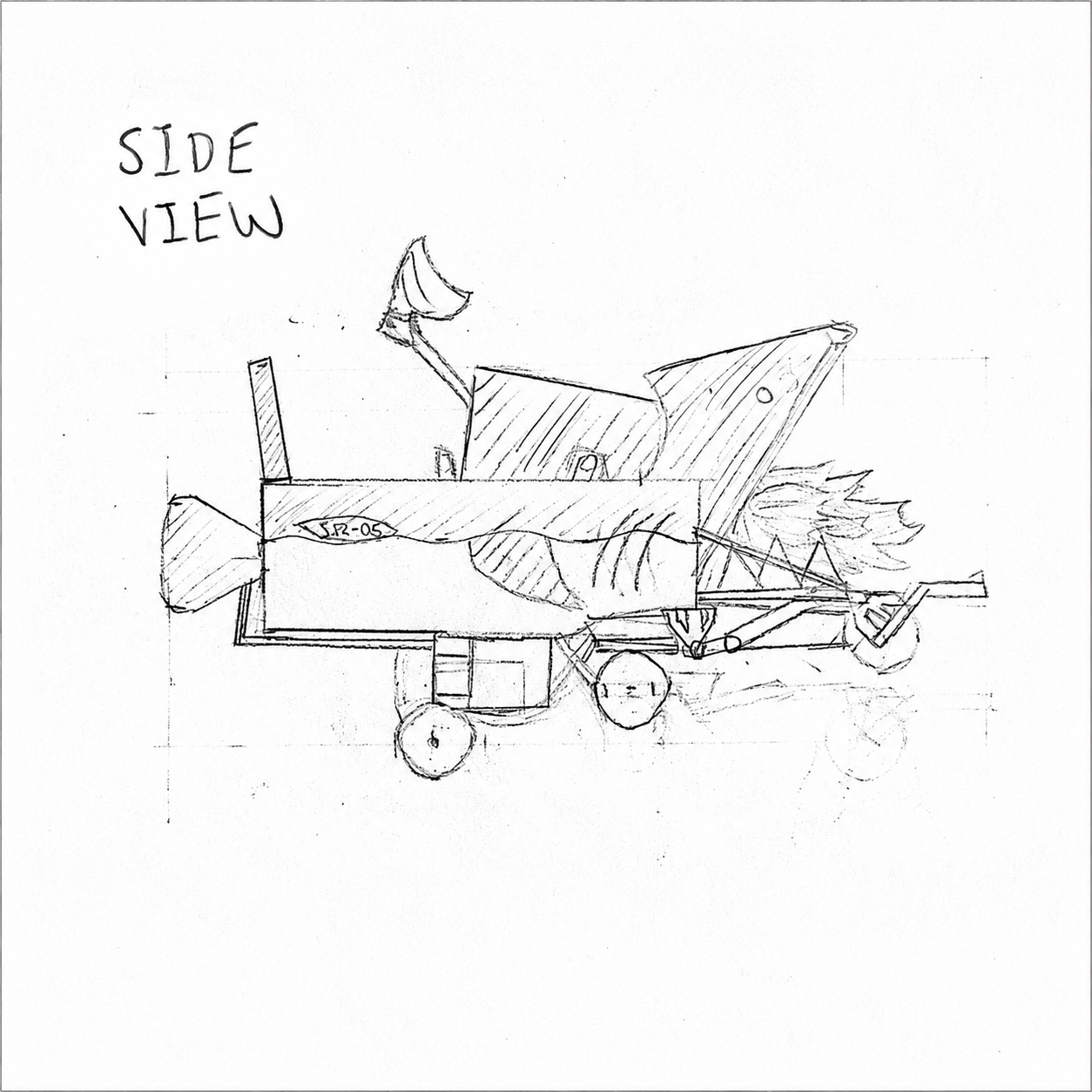
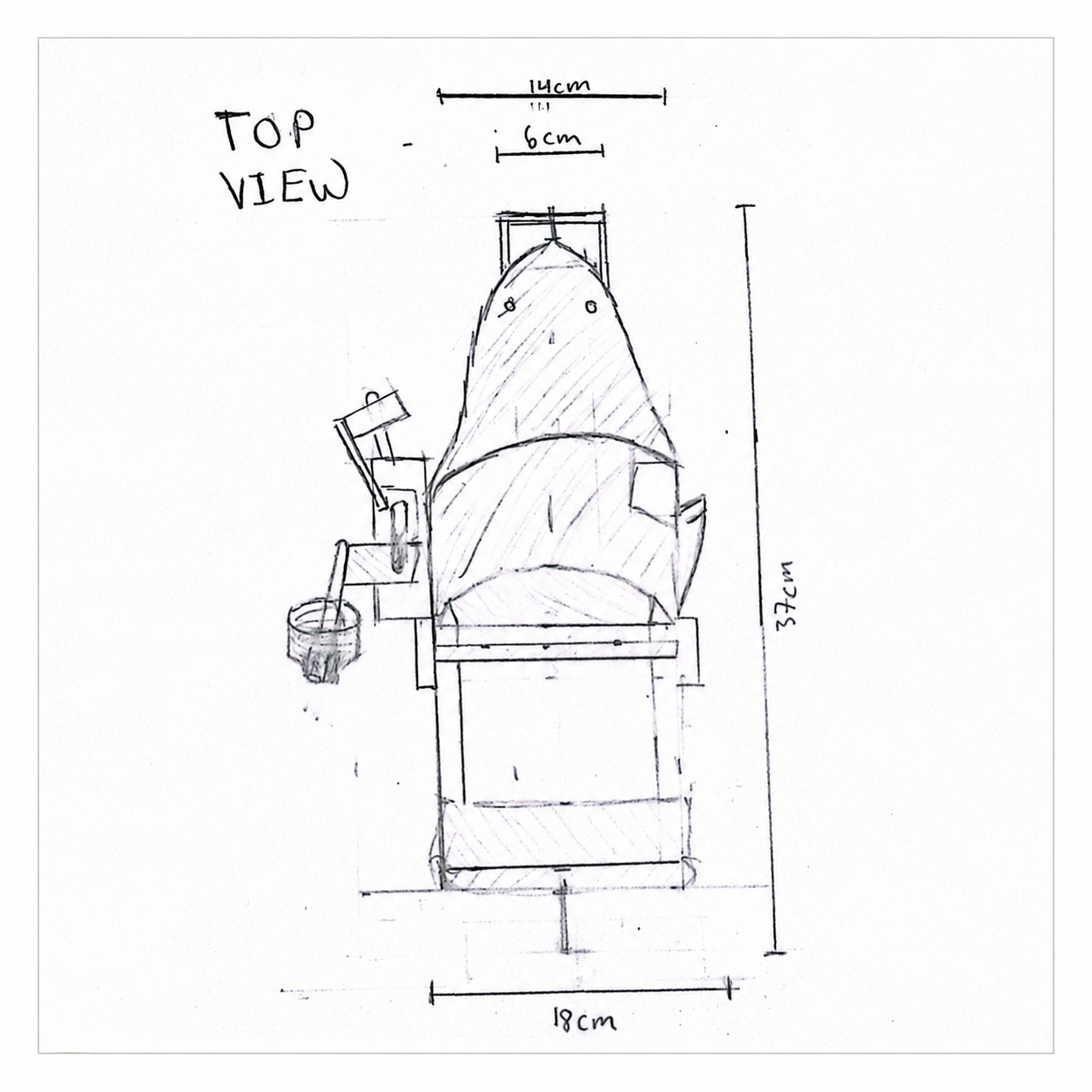
Our Teddy Bear Wheelchair project was developed over 11 weeks through a structured process that included planning, design, construction, testing, and evaluation. We began by assigning roles and brainstorming ideas before selecting a shark-themed design.
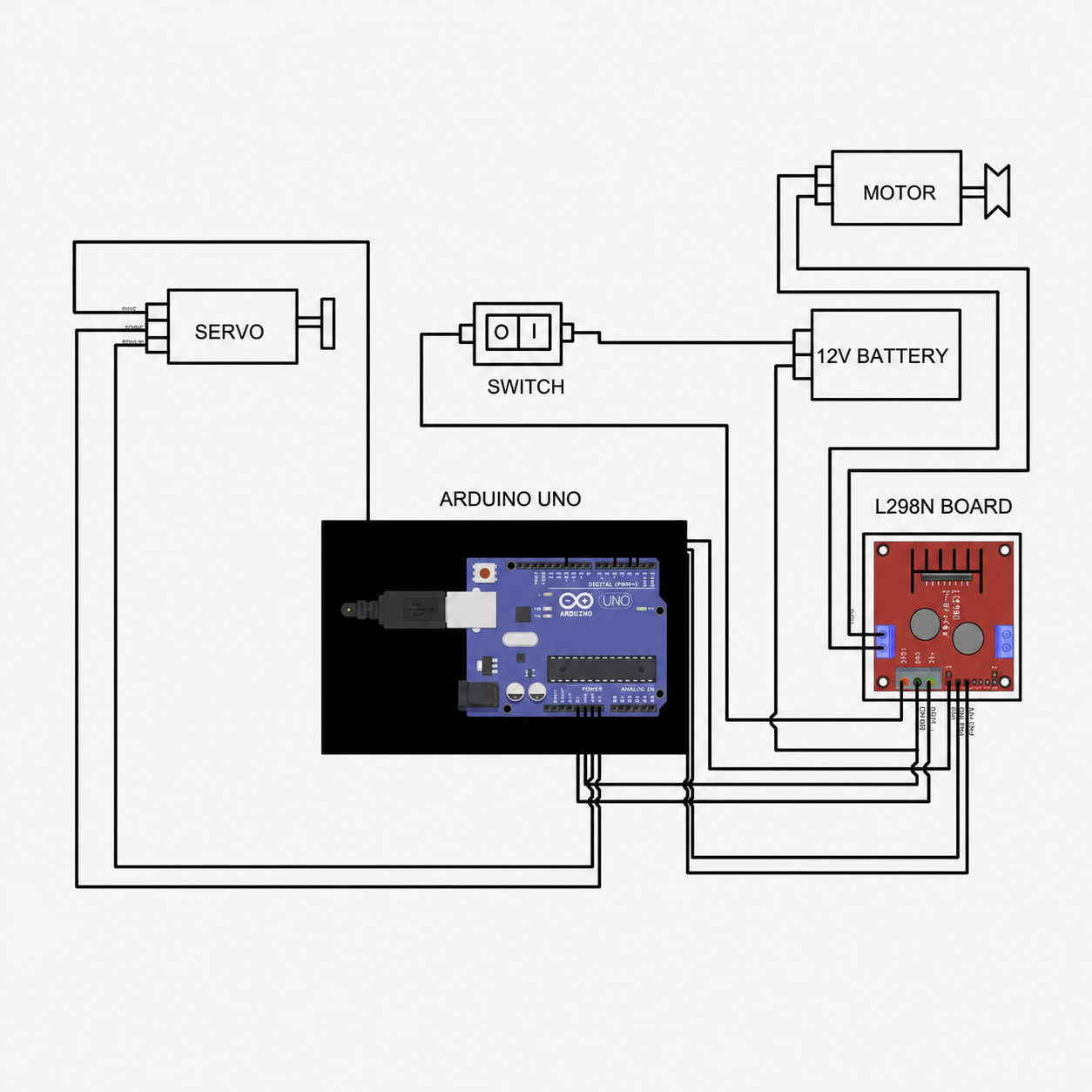
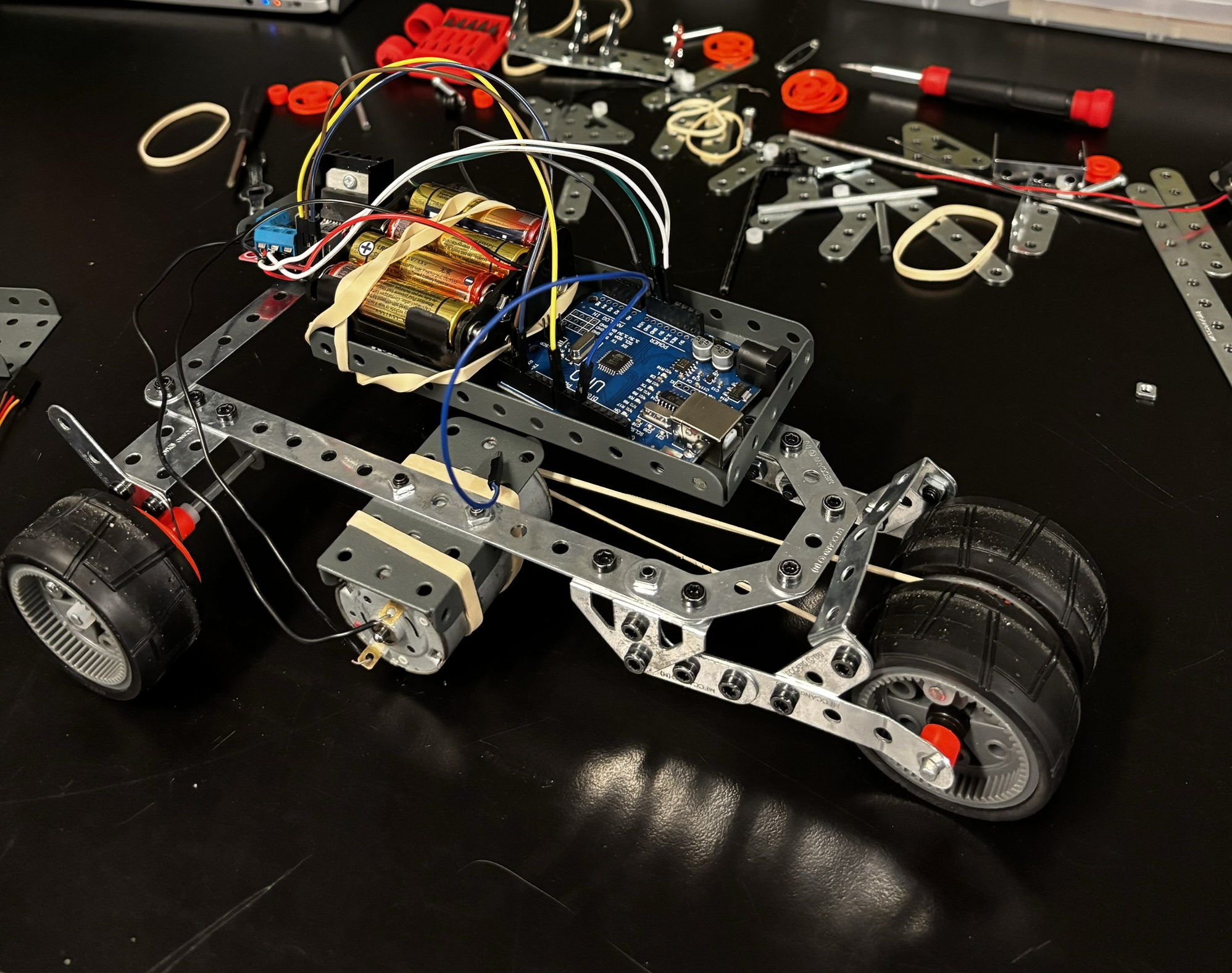
We used decision matrices to choose key components such as the aluminum chassis and motor controller, balancing strength, weight, and performance. The build involved assembling the frame, integrating electronics with an Arduino Mega, and creating a working launcher and sled hook.
We regularly tested the system, identified issues such as wheel drift and weak launch power, and refined the design accordingly. We also added aesthetic features to improve creativity and safety, while evaluating performance through speed, ramp, and trash-launch tests.
Project management tools such as Gantt charts and critical path analysis helped the team stay organized throughout the build.
What I Did
- Built and tested the main chassis.
- Built and tested the front wheel drive system.
- Built and tested different launching mechanisms using repurposed materials.
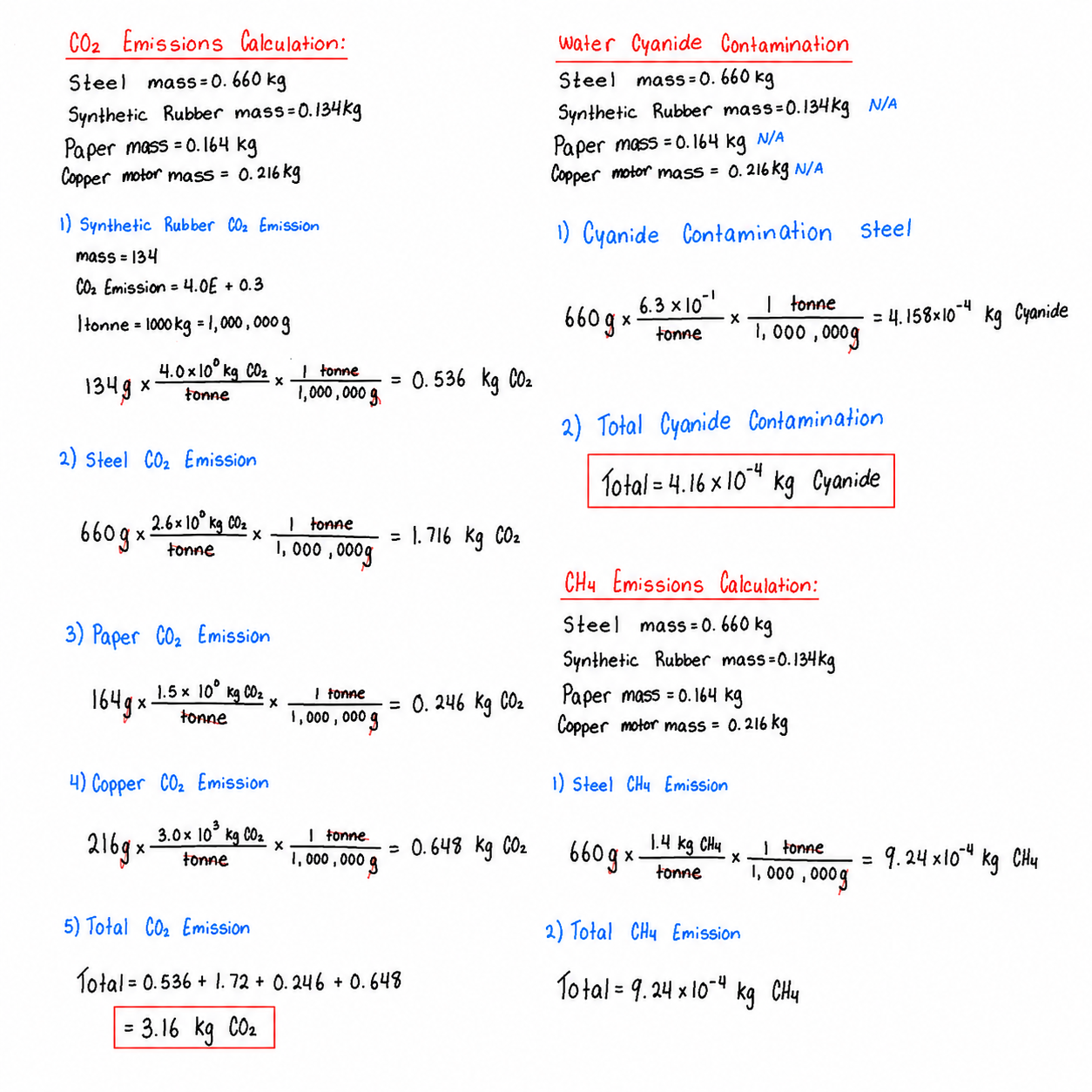
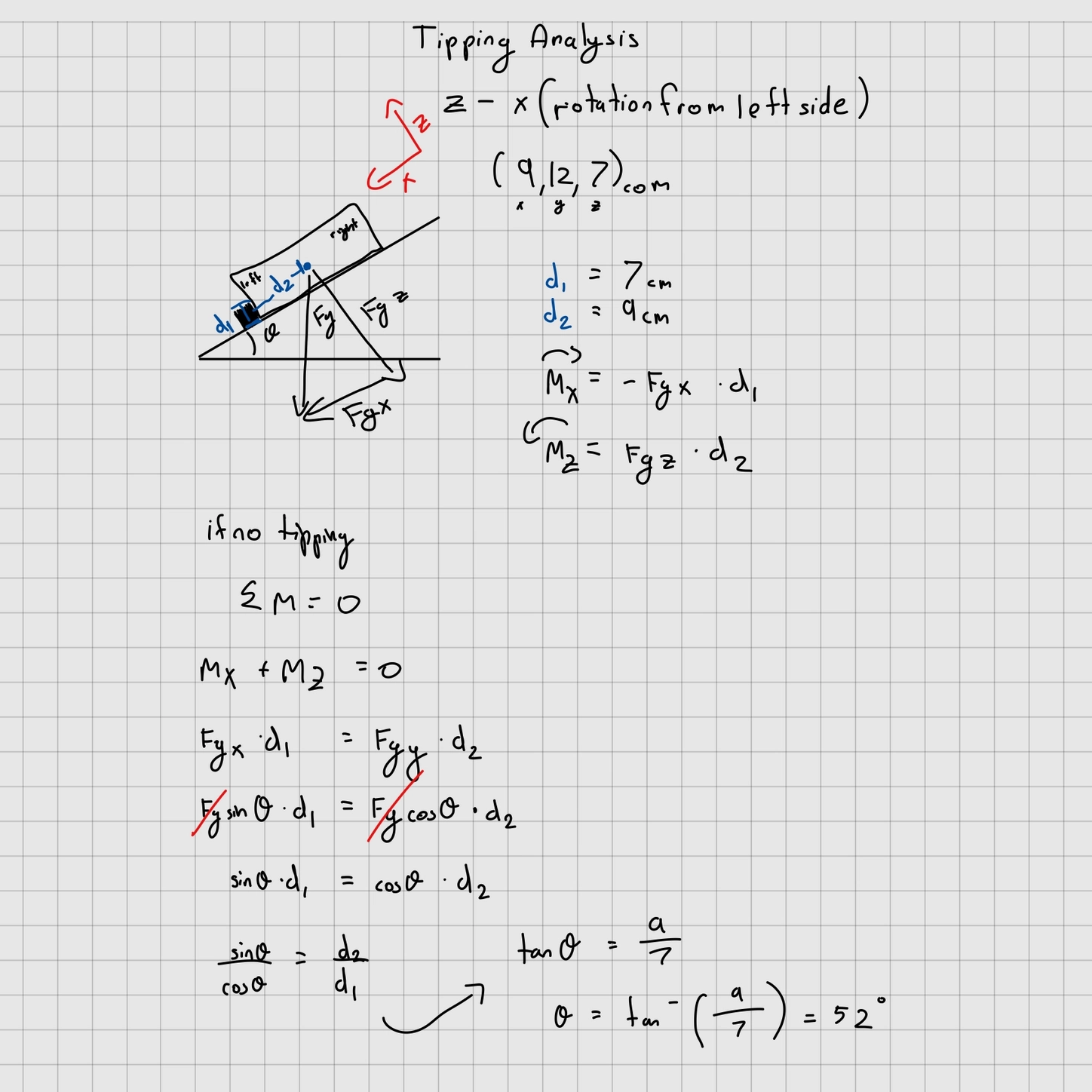
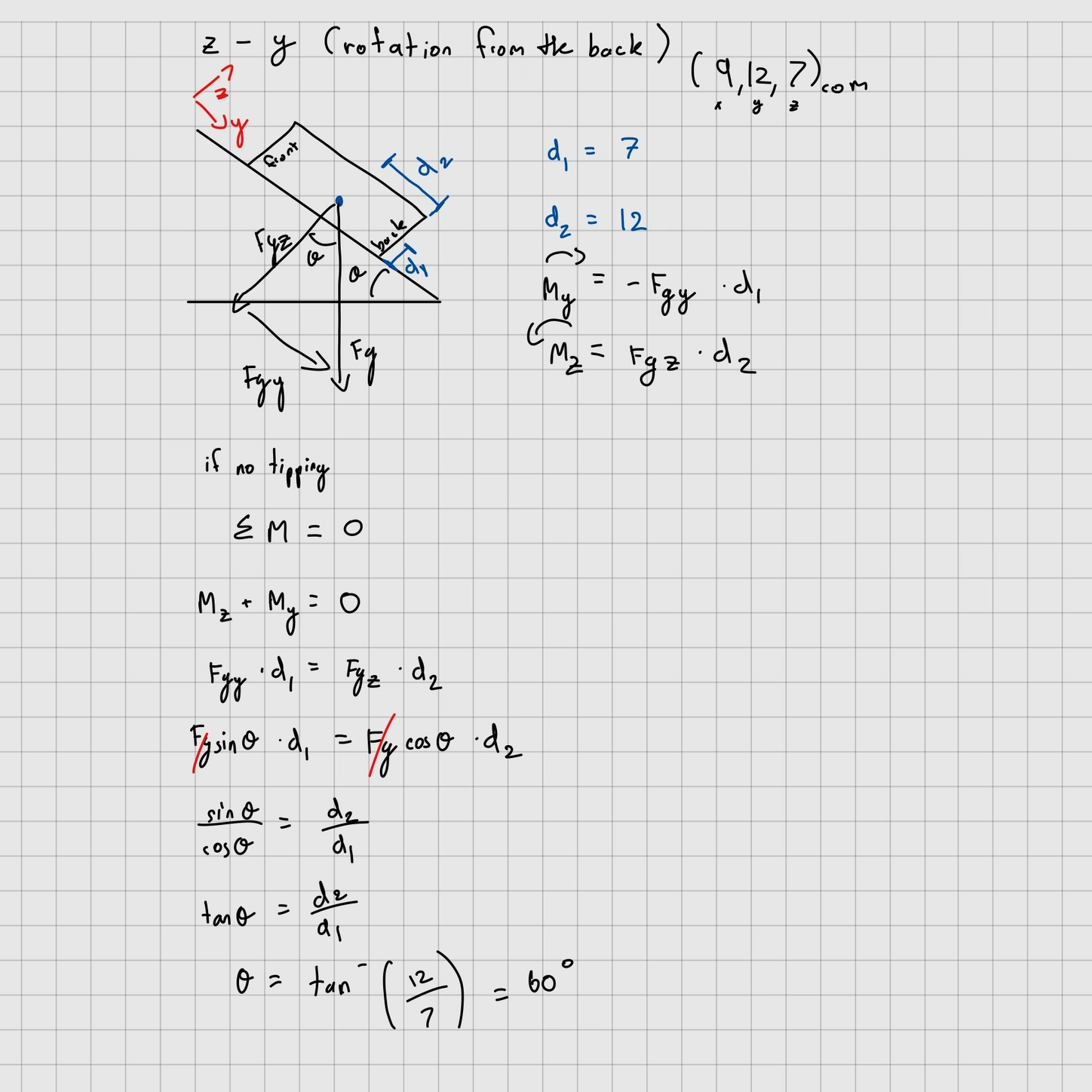
- Performed center of mass calculations and tipping analysis.
- Contributed to testing the Arduino code.
- Supported final reflection and report writing.
Engineering Analysis & Validation
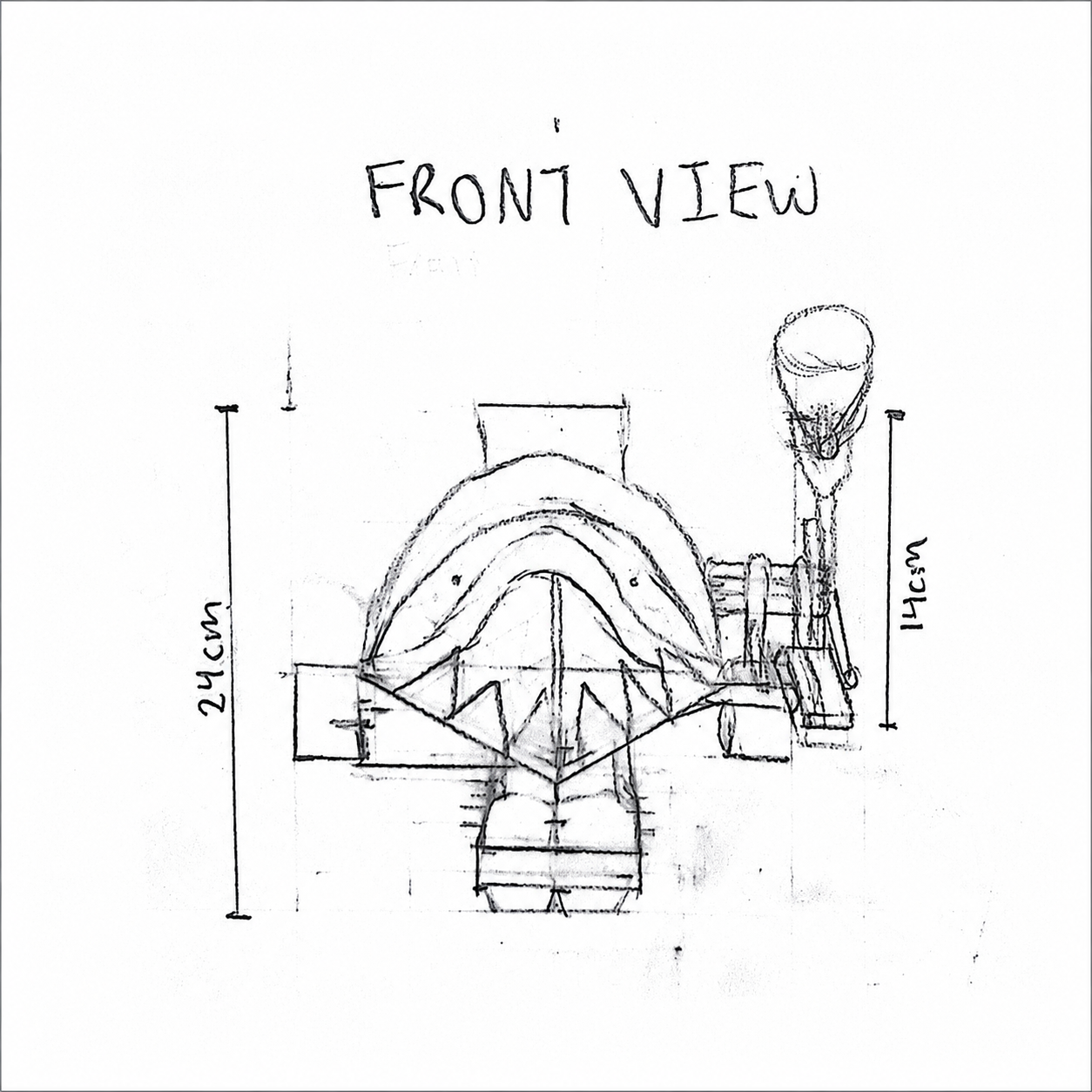
Center of mass calculations were completed based on the weight and positions of major components, using the left-back corner of the vehicle as the reference point. Tipping analysis was also completed to make sure the TBWC would remain stable on a 45° ramp, with the design considered safe if the tipping angle exceeded 45°.
Performance was evaluated through repeated testing of speed, ramp stability, and launching accuracy.
Key Takeaways
This project reinforced the importance of testing early and often, especially when balancing mechanical performance with stability and safety. It also highlighted how center of mass, time management, and the integration of aesthetics with functionality all affect the success of a design.